Pilot Tube Microtunnelling
TECHNIQUE
Pilot Tube microtunnelling is a new pipe installation technique, also sometimes called Guided Auger Boring or Pilot Pipe Jacking. It is a means of installing smaller diameter PE100 pipes in a two or three phase process where:
Phase 1 – involves the installation of a steered pilot tube which can be done with great accuracy in suitable ground conditions.
Phase 2 – involves enlarging the pilot by reaming to a little more than the external diameter of the PE100 pipe. When the pipe is not installed directly the enlarged bore is supported with a temporary steel casing. During the process the pilot tubes installed in phase 1 are pushed out progressively into the reception pit.
Phase 3 – involves pulling in the PE100 pipe from the reception end. The temporary casings and augers are pulled back at the same time. Phase 3 is omitted where the PE100 pipe is installed directly as part of phase 2.
Subject to suitable ground conditions the method can achieve a high degree of positional accuracy and is therefore suitable for gravity sewer installations as well as pressure pipes.
PE100 APPLICATIONS
- Water Mains.
- Gas mains.
- Sewers (gravity pipes & pressure mains).
- Cable ducts.
INSTALLATION PROCEDURE
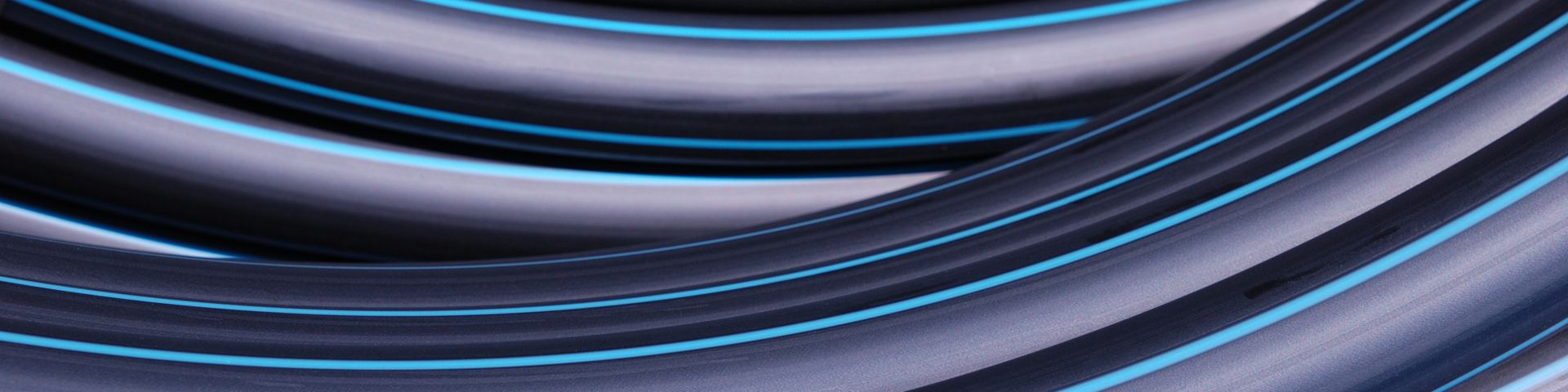
Phase 1. Images courtesy: Bohrtec Gesellschaft für Bohrtechnologie mbH
During Phase 1 pilot tubes are advanced in approximately 1m section through the ground by jacking. The pilot tubes are rotated to achieve steering by use of an angled shoe at the front. Friction and heat in the string of pilot tubes are reduced with fluid (drilling mud) injection. Positional monitoring is achieved using a theodolite fitted with a camera set to line and grade of the required bore and viewing a small target unit mounted in the leading section of the pilot tube behind the shoe. The camera image is displayed to the operator via a monitor.
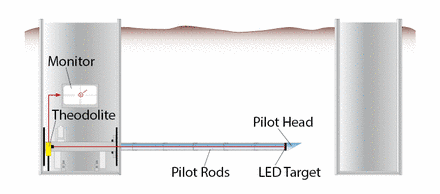
Phase 2. Images courtesy: Bohrtec Gesellschaft für Bohrtechnologie mbH
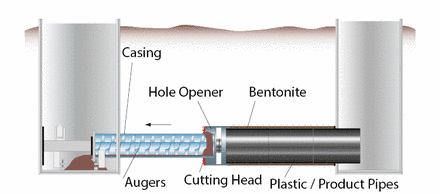
During Phase 2 (reaming phase) the pilot tubes are displaced into the reception pit by an enlarging open ended casing within which an auger rotates, driven by the rotational motor on the jacking rig. The auger feeds the ground exposed at the front of the casing back to the jacking frame where it is collected in a small muck skip which is removed and emptied periodically during advance. Casing sections are added in approximately 1m sections and jacked forwards by the jacking frame. The process continues until the casing pushes out the final section of pilot tube into the reception pit.
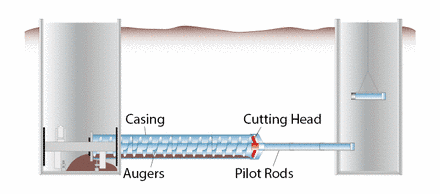
Phase 3. Images courtesy: Bohrtec Gesellschaft für Bohrtechnologie mbH
During Phase 3 the PE100 pipe is attached to a pulling head attached to either the auger string within the casing or pulling rods used in place of the auger. Where the size of the reception pit allows the PE100 pipe can be fused into a continuous length for insertion or inserted direct from a coil if not larger than DN180. Where alignment to introduce a continuous length of PE100 pipe is unavailable, short sections of pipe are fusion welded together in the receiving pit before being drawn back in stages.
Phase 3a - larger diameters. Images courtesy: Bohrtec Gesellschaft für Bohrtechnologie mbH
For larger diameter installations, further upsizing of the bored and cased hole is possible using a special hole opener. When a hole opener is in use the PE100 pipe will normally be drawn back in the same operation.
Bentonite or polymer lubricant is injected outside the casing/pipe to minimise frictional drag.
EQUIPMENT
A small hydraulically driven rotary motor provides the rotational power and is housed within a small jacking frame which provides axial thrust.
The jacking frame is lowered into a prepared supported excavation and set to the required alignment and grade of the proposed pipe.
A position monitoring system, based upon a laser theodolite, is positioned at the rear of the shaft and monitors the position of an illuminated target at the leading end of the pilot tube. The operator views the position of the pilot on a monitor. Steering is achieved using an angled shoe fitted to the front of the pilot tubes.
Pilot tube, auger and casing sections are all configured in short sections to fit the jacking rig and to permit operation of the system from minimal access excavations of between 2 and 3 metres length/diameter depending upon manufacturer.
PRACTICALITIES
The method was developed to push rigid pipe materials and the installation of PE100 pipe may require additional equipment, therefore specifiers should discuss their project specific requirements with the equipment manufacturers.
The jacking equipment must be set into a secure excavation with no movement of the excavation support/shaft lining during installation as this may affect the accuracy of the monitoring system for the steering of the pilot tube.
Range of Soil Types
Clay. Silt. Sand. Fine gravel. Coarse gravel.
In standard format the method is not generally suited to very hard soils or very dense granular materials (higher SPT "N" values). Harder ground conditions may be possible with the use of specialized tools depending upon the project. The method also has limited capability in permeable soils below the water table if a ground plug cannot be maintained within the auger during the reaming phase.
Diameter, Pressure and Length Range
The diameter of product pipe typically installed ranges from 100mm to 300mm normally but can be up to 600mm with appropriate upsizing and pulling equipment. Smaller diameter pipes may be pulled back within the approximately 100mm diameter pilot hole without the need for the reaming phase.
Installed lengths between access pits are typically up to 100m maximum depending upon ground conditions. Installations up to 150m are potentially possible in favourable conditions and with suitable experience.
Alignment: Straight shots at constant gradient only.
Pressure capability is dependent upon pipe SDR and is not a function of the method.
EXCAVATIONS
See also Excavations, pit sizes, Space and Access
DESIGN, SPECIFICATION & PLANNING
It is essential to know the depth and location of all existing utilities and other underground objects nearby.
Minimum depth should be at least 1.5 metres to minimise the risk of ground heave during the pilot installation.
This method applies tension to the PE100 pipe during installation. The tensile load on the pipe during installation must be calculated to establish whether it exceeds the maximum allowable load. Pipe manufacturers can advise on the allowable loads. If the calculation shows that the maximum permissible load may be exceeded then it may be necessary to increase the capacity of the PE100 pipe by increasing its thickness. This will require a check of ID and OD to ensure that flow capacity and external clearances are still adequate.
HEALTH, SAFETY & ENVIRONMENT
Operators need to work in the launch and reception pits so these must be appropriately supported to allow safe working access and exit.
Where cables and other utilities are identified in close proximity to the proposed alignment they should be exposed so that progress of the pilot can be monitored and stopped if required.